The adventures with the Crazyflie on Linux Slackware 14.2 begins! … with troubles 🙂
The goal is to get it going with Python, then with Matlab, then with Simulink, then with a mount that will bind it nicely to the ground with 3DOF gimbal.
Let’s start with drivers and Python.
First of all, grab the slackbuilds package manager if you still don’t have it: https://github.com/sbopkg/sbopkg/releases/download/0.38.1/sbopkg-0.38.1-noarch-1_wsr.tgz
installpkg sbopkg-0.38.1-noarch-1_wsr.tgz
Sync the repository by running:
sbopkg
and choose Sync.
And again if you don’t have it already – install python3:
sbopkg -i python3
If you REALLY don’t like package managers – skip all of the above and just download python3 on your own.
Now the fun begins – clone the github repo with tools for Crazyflie:
git clone https://github.com/bitcraze/crazyflie-lib-python cd crazyflie-lib-python ./setup_linux.sh
and YES – we do it the hard way, uphill, two meters of snow, because when I tried the pip way it didn’t work. No idea why.
Add your current user to the plugdev group if don’t have him there already:
groups su usermod -a -G plugdev USERNAME_HERE
Since it modifies rules for udev a restart may be necessary, YMMV.
A test?
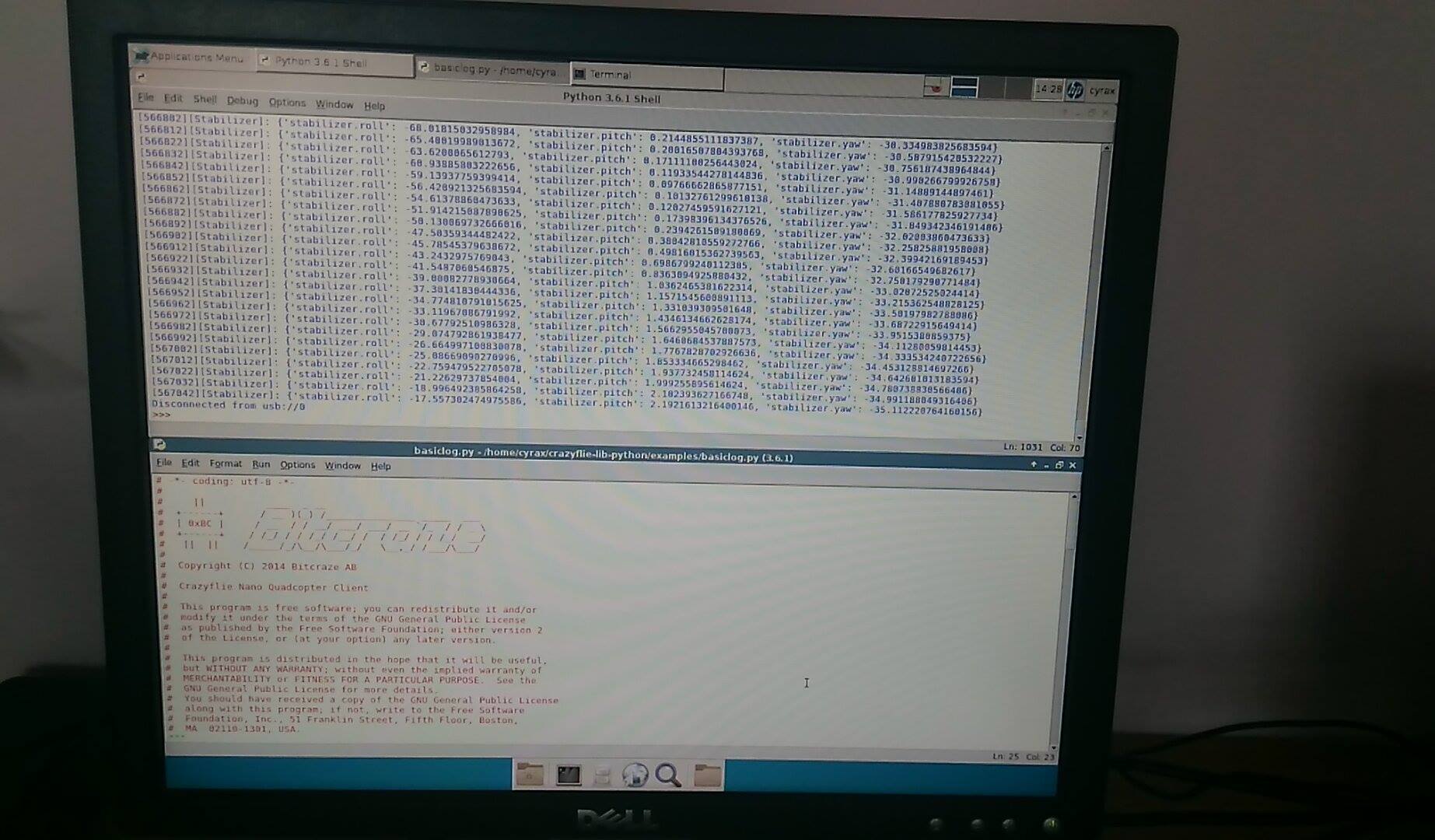
cd crazyflie-lib-python cd examples python3 basiclog.py
And you can use IDLE3 as a gui if you want:
¿Could you post the installation instructions for the Crazyflie PC client?
You mean the linux gui that comes with crazyflie? Or the windows one?
The Linux GUI!