(work in progress, I will add links and photos when I have time)
My private robots:
 |
Robotis Bioloid humanoid 18 Dynamixel AX-12 servos, I prefer connecting them directly to Matlab by USB2Dynamixel Kinematic control is quite good, with differential inverse kinematics Dynamic control terrible, robust PI controller needed in most cases Servo identification by black-box methods works (sometimes) |
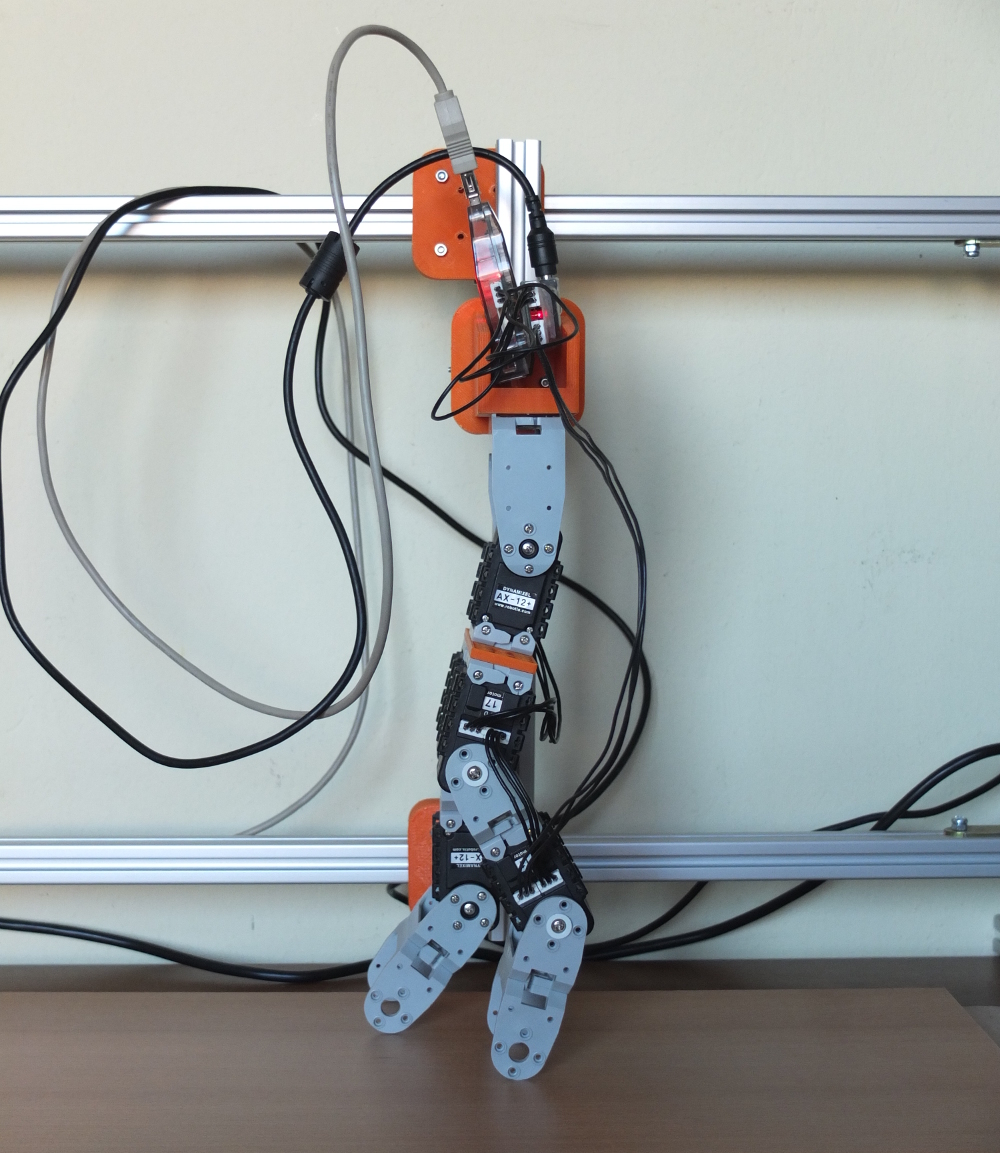 |
Planar biped Kinematic control works perfectly every time Dynamic control – basic, with an approximate model of the servo It is possible to control AX-12 in open-loop mode (direct PWM to the motor)! |
Robots which I helped create:
unnamed (Asus xtion on top of several Dynamixel AX-12)
Robots on which I still work:
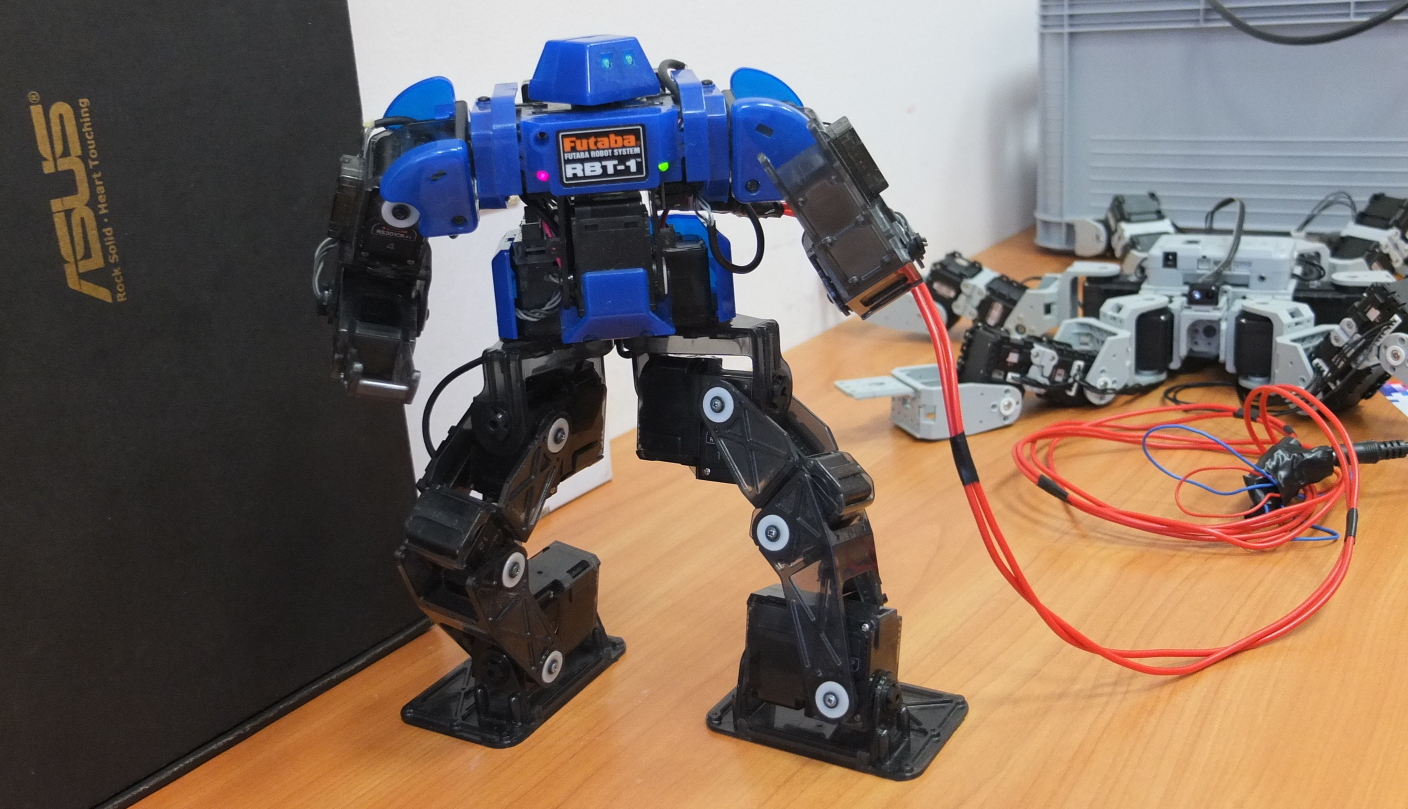 |
Futaba RBT-1 RS485 controller servos, but interface with USB2Dynamixel works pretty well with Matlab |
Crazyflie 2
Quadruped robot
Past robots:
 |
Robotis Bioloid, spider only basic forward-backward movements |