During my recent works with SEA (Series Elastic Actuators) I was using motors with gearboxes and was happy – as happy as a researcher can be in that scenario. So not very much.
All my gearboxes are scrapped from different servos, be it small 9g 1$ blue servo (SG-90) or a “slightly” more expensive Dynamixel MX-64. But what if… I design my own?
https://github.com/adamlukomski/sea/tree/master/gears
I love fiddling in OpenSCAD. Writing code AND getting a graphical result instead of working on my thesis? I can do it any time (don’t tell my supervisor).
So the idea is to create a simple planetary gearbox, with a small, tiny ratio of… I dunno, 1:50? 1:100? Oh, and I hate screws, make that without bearings and as few screws and nuts as possible (but not none, I want to slap a sign “May contain nuts” on it later on).
So first – is there a planetary gearbox on Thingiverse? And most important – …OpenSCAD?
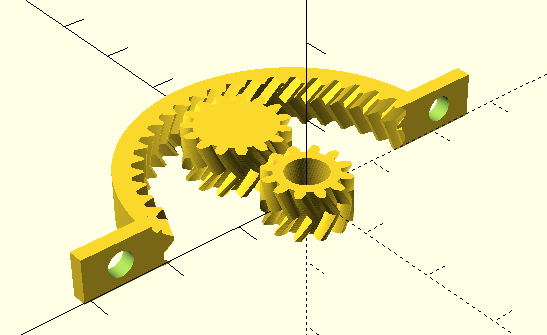
Ok, there is. Even with helical gears, but I want to have total control over the process. So maybe I’ll start with the flat ones? Either way, I need to modify it a lot to get a screwless version.
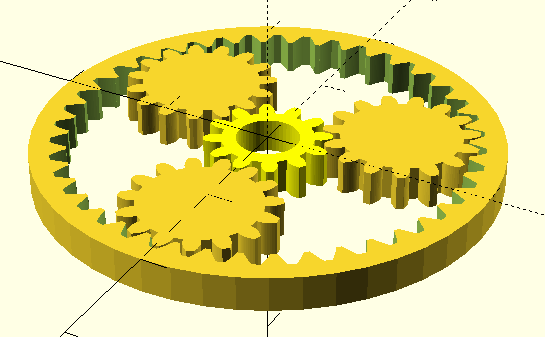
First of all, let me strip it bare-naked to the gears:
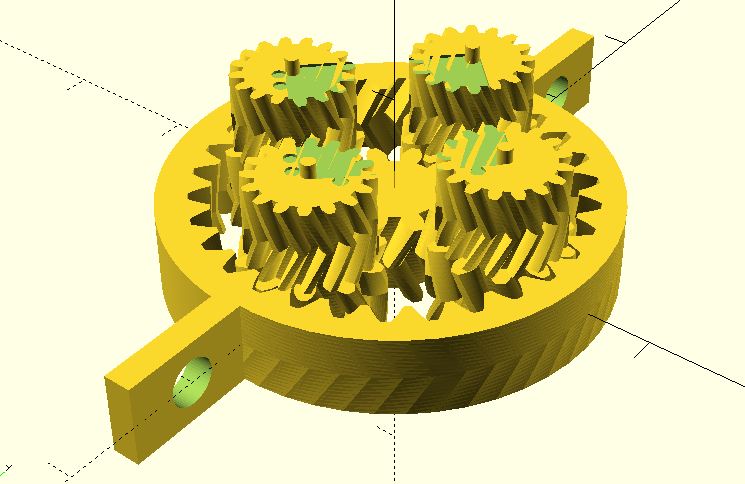
But I can’t print it like that! So let me make it a double-helical gear (Wikipedia: Herringbone gear)
The next sketch is not that great – I tried making and actual compound planetary gearbox by putting just one gear on top of each other and calling it a day, but it turns out the three planets ARE NOT IDENTICAL. Each is unique and all three should be printed. So it may seem like the following movie is acceptable but in reality the gearbox is losing a step every now and then. The gear ratio is around 1:50 if I remember correctly.
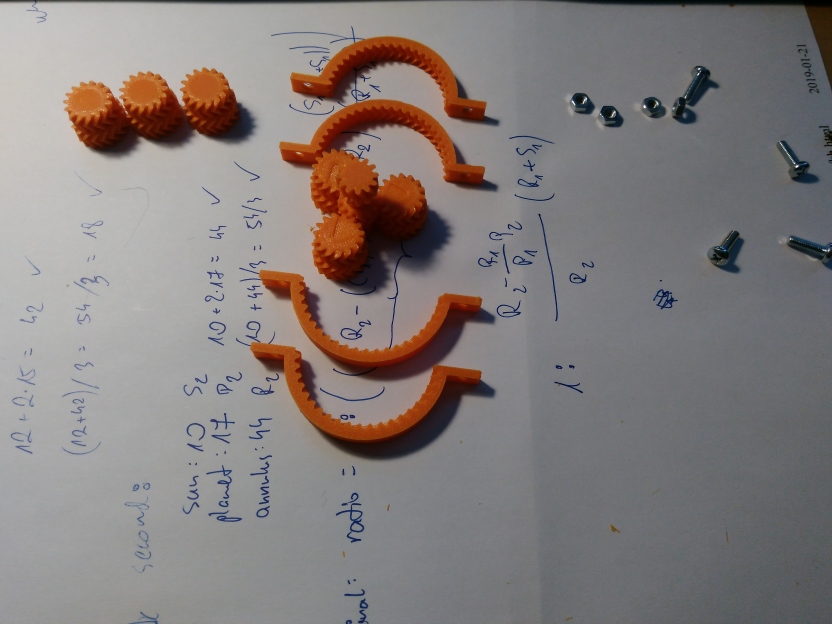
Ok, this time I will stack them very carefully and engrave them with unique calibration markings on top:



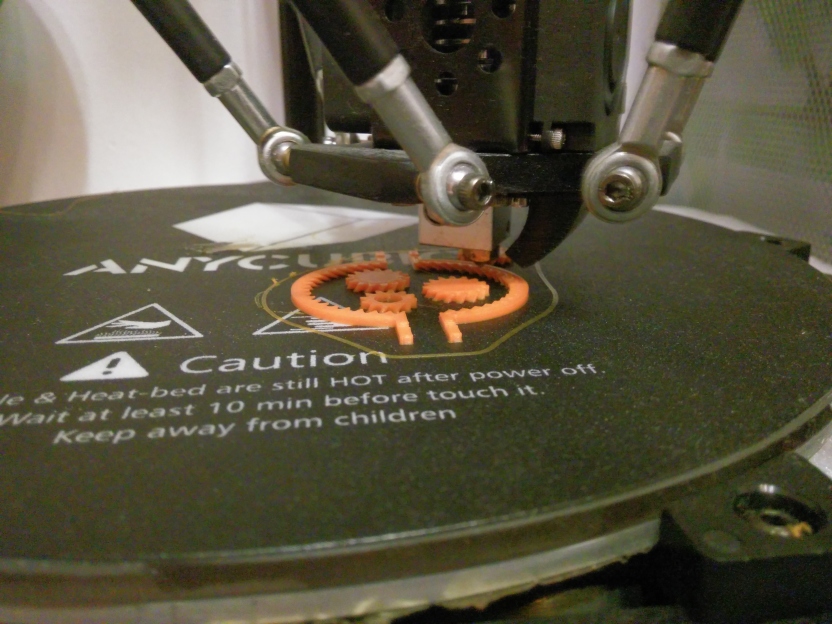
It’s working! It’s flimsy, doesn’t take too much load, easily falls out, is too loose (I could shave about 0.3mm off the tolerances), but it works!
Movie where I put it to the test with an electric drill – soon.
Hi, I’ve been designing my own compound planetary gearbox and I’m having trouble with the stacked planets. How do you know how to stack them differently. Mine has four planets and it’s so confusing!
I did markings on all of them, look at a picture that looks like rendering errors – I engraved (“difference” function) a square on top of them, so that I can just align them using those lines. If the planets are aligned then they will fit inside a ring. If I were to print something like that now I would make an additional tool to calibrate those – a flat surface on which I can place all planets (with rectangular pins so that they don’t even rotate) and then I would place a ring around them
I think i get what you mean with the square engraved into the top, but do the planet gears actually need to be different? Do they all need a different ‘twist’ between the top and bottom planets?
Thanks man!
Generally – no, but stacking gears on top of each other like I did means that each can be unique. Sure, if I had time probably I would’ve aligned everything so that they would be identical, but it was a quick hack to make a gearbox more out of a boredom than actual need.
Got it. Thanks for your help, I appreciate it!